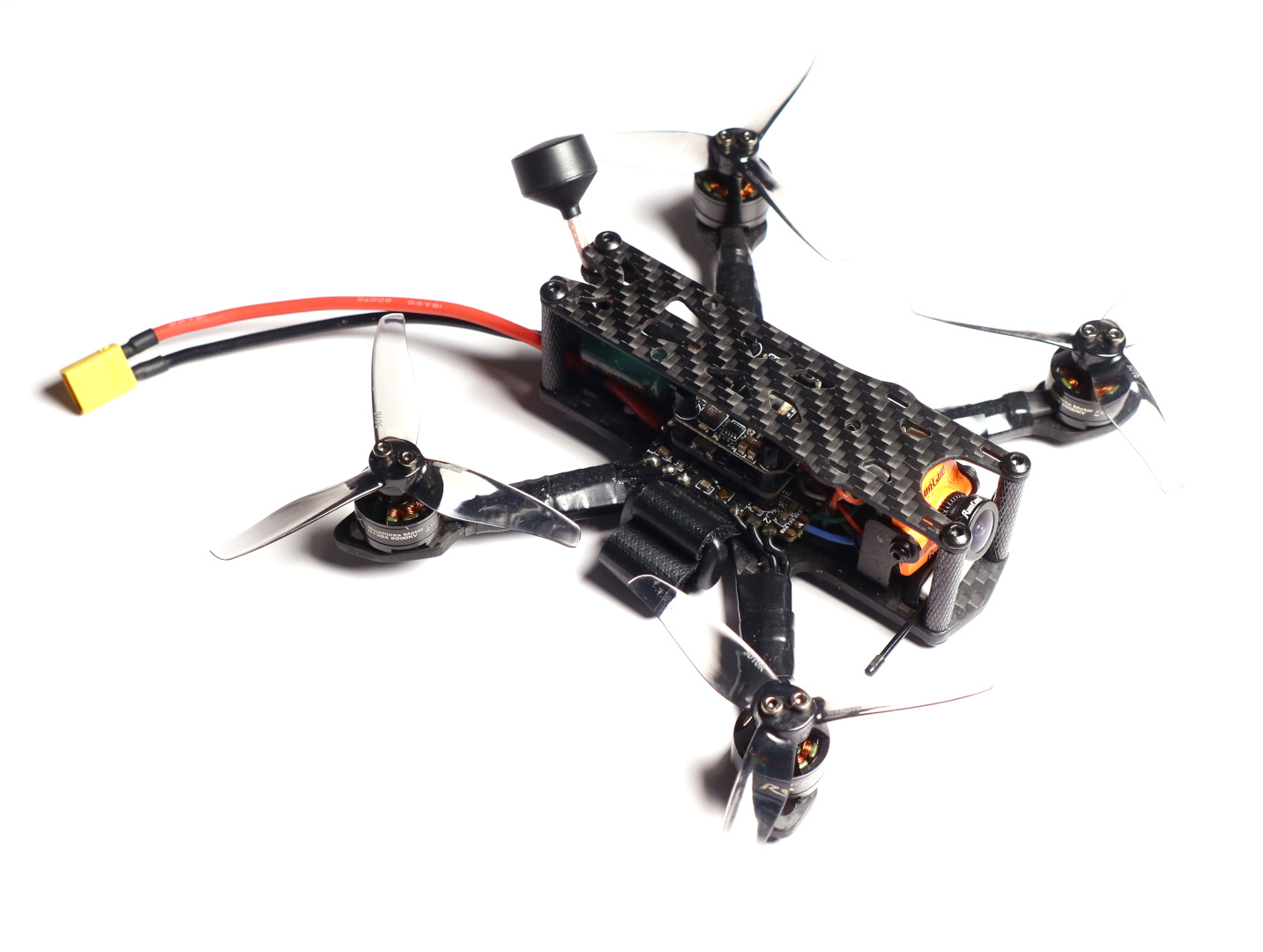
Martian IV (3 inch)
| Specifications | |
|---|---|
| Frame | Realacc Martian IV (3 inch) |
| FC+ESC | HGLRC F4 Zeus AIO 15A |
| Motors | RCX H1304 5000KV |
| Props | Emax Avan 3x2.4x3 GemFan 3x1.6x3 |
| Receiver | ImmersionRC Ghost Atto |
| Camera | RunCam Robin with 1.8 mm lens |
| DVR | RunCam Mini FPV DVR Module |
| VTX | AKK FX3 |
| Antenna | Realacc UXII Stubby RHCP antenna |
| Battery | Tattu 3S 450 mAh 75C Turnigy nano-tech 3S 850 mAh 45C |
| Weight | 121 g 164 g (with 3S 450 mAh battery) |
| M2M | 14 cm |
| Flight time | 4-8 minutes |
Videos
Notes
- Edges of frame pieces should be sanded to avoid wear in wiring
- ESC didn't have issues with firmware flashing, came with old firmware that doesn't support turtle mode
- FC is essentially 3S max
- The FC bundle provided 470uF 25V capacitor was replaced with a 1000uF 35V (both low ESR)
- Configuring F.Port with the FC didn't for some reason succeed in providing two way communication resulting in lack of telemetry, RSSI however gets transmitted and shown in OSD (FrSky R-XSR specific)
- Power wire needed to be longer than usual due to the short wires used in the Tattu batteries
- For power wire management, it's better to have the battery strapped with wires facing forward
DVR control
The RunCam DVR Module has an extra pad marked H/L which can be used to control the recording functionality. Betaflight supports having the recording start from arming (or other action) and then stop once disarmed (or other action). However, this isn't visible in the user interface and requires CLI configuration. Existing Betaflight documentation can be found from https://github.com/betaflight/betaflight/wiki/Pinio-and-PinioBox
The following command set the DVR to start recording when armed and stop when disarmed. As a bonus, there appears to be a 1-2 second delay at least when the recording stops after disarming.
resource MOTOR 6 NONE resource SONAR_ECHO NONE resource PINIO 1 A08 set pinio_config = 129,1,1,1 set pinio_box = 0,255,255,255 save
A08 refers to the S6 wire in the FC multiwire connector. It's mapped in the firmware to motor 6 and sonar echo which both need to first be released before pin i/o can be enabled for gaining DVR control.
Wiring
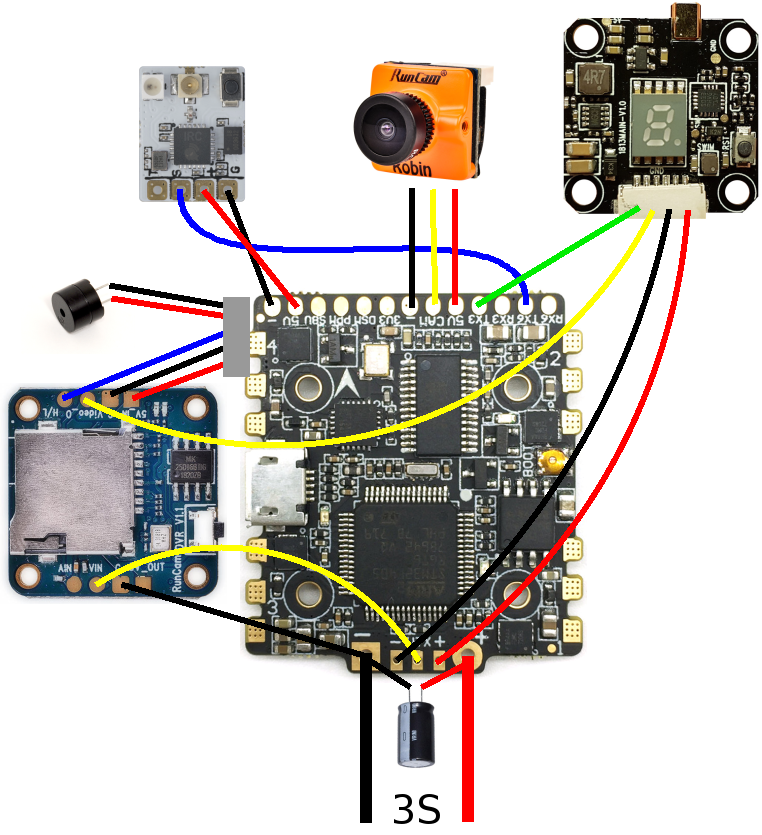
- BB from FC connector (white wire) is for buzzer
- S6 from FC connector (yellow wire) is DVR control
- TX3 from FC is used for VTX SmartAudio
- TX6 from FC is used for the receiver
- Dual ground wiring in DVR is needed to reduce signal noise
- The FC connector is in reality in the top end of the FC but has been marked in the image on the side for clarity, unused wires can be removed
- The shown wiring result in the OSD being visible in the video recorded by the DVR
Page Tools
